Search Results
A Unified Model with Inertia Shaping for Highly Dynamic Jumps of Legged Robots
A Unified Model with Inertia Shaping for Highly Dynamic Jumps of Legged Robots version2
Teaser abstract #5
An Adaptable Approach to Learn Realistic Legged Locomotion without Examples (ICRA 2022)
[10] A. Li, 6th Workshop on Legged Robots ICRA'22
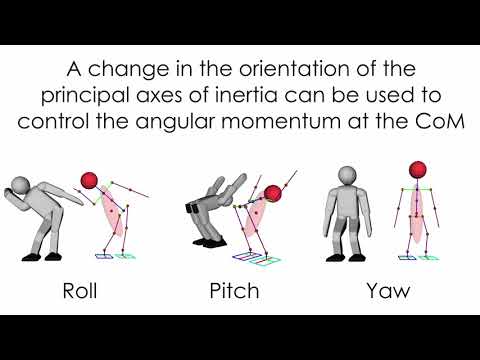
Wensing and Orin - IROS 2013
Fast Whole-Body Motion Control of Humanoid Robots with Inertia Constraints
Design and Control of a Quadruped Robot Panther for Highly Dynamic Motions
quadruped.mp4
ICRA 2021 Workshop on Teleoperation of Dynamic Legged Robots in Real Scenarios
Optimization-based Legged Odometry and Sensor Fusion for Legged Robot Continuous Localization
Training a Legged Robot to walk by Deep Reinforcement Learning
![[10] A. Li, 6th Workshop on Legged Robots ICRA'22](https://img.youtube.com/vi/TnOx47EkkTs/hqdefault.jpg)